Nissan Versa (N17): System
System Diagram
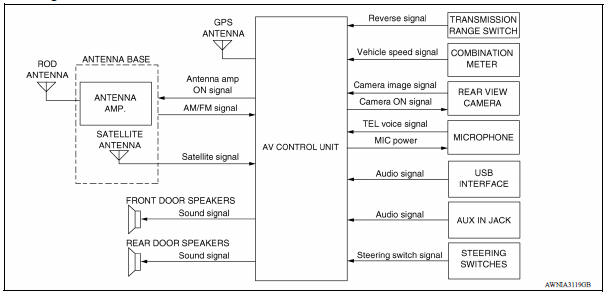
System Description
AUDIO SYSTEM
The audio system consists of the following components
- AV control unit with built-in display
- Front door speakers
- Rear door speakers
- Steering wheel audio control switches
- USB interface
- AUX in jack
- Satellite antenna
- Antenna amp.
- Rod antenna
When the audio system is on, AM/FM signals received by the rod antenna are amplified by the antenna amp.
and sent to the AV control unit. The AV control unit then sends audio signals to the front door speakers and rear door speakers.
Refer to Owner's Manual for audio system operating instructions.
SATELLITE RADIO FUNCTION
- Satellite radio function is built into AV control unit.
- Sound signal (satellite radio) is received by satellite antenna and transmitted to AV control unit. AV control unit outputs sound signal to each speaker.
USB INTERFACE FUNCTION
- iPod or music files in USB memory can be played.
- Sound signals are transmitted from USB interface to the AV control unit and output to each speaker.
- iPod is recharged when connected to USB interface.
iPod is a trademark of Apple inc., registered in the U.S. and other countries.
AUXILIARY INPUT FUNCTION
- Sound can be output from an external device by connecting the device to the AUX in jack.
- AUX sound signals are transmitted to each speaker via AV control unit.
REAR VIEW MONITOR FUNCTION
Camera Image Operation Principle
- The AV control unit supplies power to the rear view camera when receiving a reverse signal.
- The rear view camera transmits camera images to the AV control unit when power is supplied from the AV control unit.
- The AV control unit combines a warning message and fixed guide lines with an image received from the rear view camera to display a rear view camera image on the screen.
SPEED SENSITIVE VOLUME SYSTEM
- Volume level of this system goes up and down automatically in proportion to the vehicle speed.
- The control level can be selected by the customer.
HANDS-FREE PHONE SYSTEM
- Bluetooth control is built into AV control unit.
- The connection between cellular phone and AV control unit is performed with Bluetooth communication.
- The voice guidance signal is input from the AV control unit and output to the front speakers when operating the cellular phone.
When A Call Is Originated
- Spoken voice sound output from the microphone (microphone signal) is input to AV control unit.
- AV control unit outputs to cellular phone with Bluetooth communication as a TEL voice signal.
- Voice sound is then heard at the other party.
When Receiving A Call
- Voice sound is input to own cellular phone from the other party.
- TEL voice signal is input to AV control unit by establishing Bluetooth communication from cellular phone, and the signal is output to front speakers.
NAVIGATION SYSTEM
Description
- The navigation system can be operated using the display (touch panel) of the AV control unit.
- Guide sound during operation of the navigation system is output from AV control unit to front speakers.
- AV control unit calculates the vehicle location based on the signals from GYRO (angle speed sensor), vehicle sensor, and GPS satellite, as well as the map data from map SD-card. Vehicle location is displayed on the AV control unit.
Refer to Owner's Manual for navigation system operating instructions.
Position Detection Principle
The navigation system periodically calculates the vehicle's current position according to the following three signals:
- Travel distance of the vehicle as determined by the vehicle speed sensor
- Turning angle of the vehicle as determined by the gyroscope (angular velocity sensor)
- Direction of vehicle travel as determined by the GPS antenna (GPS information)
The current position of the vehicle is then identified by comparing the calculated vehicle position with map data read from the map SD-card (map-matching), and indicated on the screen as a vehicle mark. More accurate data is judged and used by comparing vehicle position detection results found by the GPS with the result by map-matching.
The current vehicle position will be calculated by detecting the distance the vehicle moved from the previous calculation point and its direction.
- Travel distance
Travel distance calculations are based on the vehicle speed sensor input signal. Therefore, the calculation may become incorrect as the tires wear down. To prevent this, an automatic distance correction function has been adopted.
- Travel direction
Change in the travel direction of the vehicle is calculated by a gyroscope (angular velocity sensor) and a GPS antenna (GPS information).
They have both advantages and disadvantages.

More accurate traveling direction is detected because priorities are set for the signals from these two devices according to the situation.
Map-Matching
Map-matching compares a current location detected by the method in the "Location Detection Principle" with a road map data from map SD-card.
NOTE: The road map data is based on data stored in the map SD-card.
The vehicle position may not be corrected under the following circumstances and after driving for a certain time when GPS information is difficult to receive. In this case, the vehicle mark on the display must be corrected manually.
- In map-matching, alternative routes to reach the destination will be
shown and prioritized, after the road on which the vehicle is currently
driven has been judged and the vehicle mark has been repositioned.
Alternative routes will be shown in different order of priority, and the incorrect road can be avoided if there is an error in distance and/or direction.
Routes are of the same priority if two roads are running in parallel.
Therefore, the vehicle mark may appear on either of them alternately, depending on maneuvering of the steering wheel and configuration of the road.
- Map-matching does not function correctly when a road on which
the vehicle is driving is new and not recorded in the map SD-card,
or when road pattern stored in the map data and the actual road
pattern are different due to repair.
The map-matching function may find another road and position the vehicle mark on it when driving on a road not present in the map.
Then, the vehicle mark may change to it when the correct road is detected.
- Effective range for comparing the vehicle position and travel direction calculated by the distance and direction with the road data read from the map SD-card is limited. Therefore, correction by map-matching is not possible when there is an excessive gap between current vehicle position and the position on the map.
GPS (Global Positioning System)
GPS (Global Positioning System) is developed for and is controlled by the US Department of Defense. The system utilizes GPS satellites (NAVSTAR), transmitting out radio waves while flying on an orbit around the earth at an altitude of approximately 21,000 km (13,049 mile).
The receiver calculates the travel position in three dimensions (latitude/ longitude/altitude) according to the time lag of the radio waves that four or more GPS satellites transmit (three-dimensional positioning).
The GPS receiver calculates the travel position in two dimensions (latitude/longitude) with the previous altitude data if the GPS receiver receives only three radio waves (two-dimensional positioning).
GPS position correction is not performed while stopping the vehicle.
Accuracy of the GPS will deteriorate under the following conditions:
- In two-dimensional positioning, GPS accuracy will deteriorate when altitude of the vehicle position changes.
- The position of GPS satellite affects GPS detection precision. The position detection may not be precisely performed.
- The position detection is not performed if GPS receiver does not receive
radio waves from GPS satellites.
(Inside a tunnel, parking in a building, under an elevated highway etc.) GPS receiver may not receive radio waves from GPS satellites if any object is placed on the GPS antenna.
NOTE:
- The detection result has an error of approximately 10 m (32.81 ft) even with a high-precision three dimensional positioning.
- There may be cases when the accuracy is lowered and radio waves are stopped intentionally because the GPS satellite signal is controlled by the US trace control center.
 Precautions
PrecautionsDiagnosis system (AV Control unit)
Description The AV control unit on board diagnosis performs the functions listed in the table below: Perform CONSULT diagnosis if the AV control unit on board diagnosis does not start or t ...
Other materials:
4-speed automatic transmission fluid (ATF) (if so equipped)
When checking or replacement of automatic
transmission fluid is required, it is recommended
that you visit a NISSAN dealer for servicing.
WARNING
When the engine is running, keep
hands, jewelry and clothing away from
any moving parts such as the cooling
fan and drive belts
Automatic t ...
Power supply and ground circuit
Diagnosis Procedure
1.CHECK GROUND CONNECTION
Turn ignition switch OFF.
Check ground connection E. Refer to Ground Inspection in GI, "Circuit
Inspection".
Is the inspection result normal?
YES >> GO TO 2.
NO >> Repair or replace ground connection.
2.CHECK ECM G ...
Categories
- Manuals Home
- Nissan Versa Owners Manual
- Nissan Versa Service Manual
- Video Guides
- Questions & Answers
- External Resources
- Latest Updates
- Most Popular
- Sitemap
- Search the site
- Privacy Policy
- Contact Us

0.0049